
Developing autonomous vehicles: Where are we now and why use a simulator for faster development?
模拟器 · 汽车 · 4 分钟阅读

A full-blown driving simulator to test autonomous vehicles? It sounds rather contradictory: why would you put a human in a simulator when the objective is that the car drives autonomously? Nonetheless, such a simulator is exactly what you will find at the Institute for Driver Assistance and Connected Mobility (IFM), an institution of the University of Applied Sciences Kempten (Germany). We had the pleasure of talking to Professor Bernhard Schick, the founder and director of this Institute, about the progression made in the field of autonomous vehicles, and about the use of simulators during research.
The IFM, and especially its research group Adrive, focuses on the fields of Advanced Driver Assistance Systems, Automated Driving, and Vehicle Dynamics. It is a very well-equipped research center, complete with its own testing track, labs and simulator. Professor Schick has pioneered research in autonomous vehicles for years, and is as such excellently suited to give an update on developments in this field.
Could you tell us where we are now?
That is a tricky question to answer, because it depends on what you expect from the systems. We generally use a 0 to 5 framework to distinguish the level of vehicle autonomy – with 0 being full human control and 5 being complete autonomous driving.
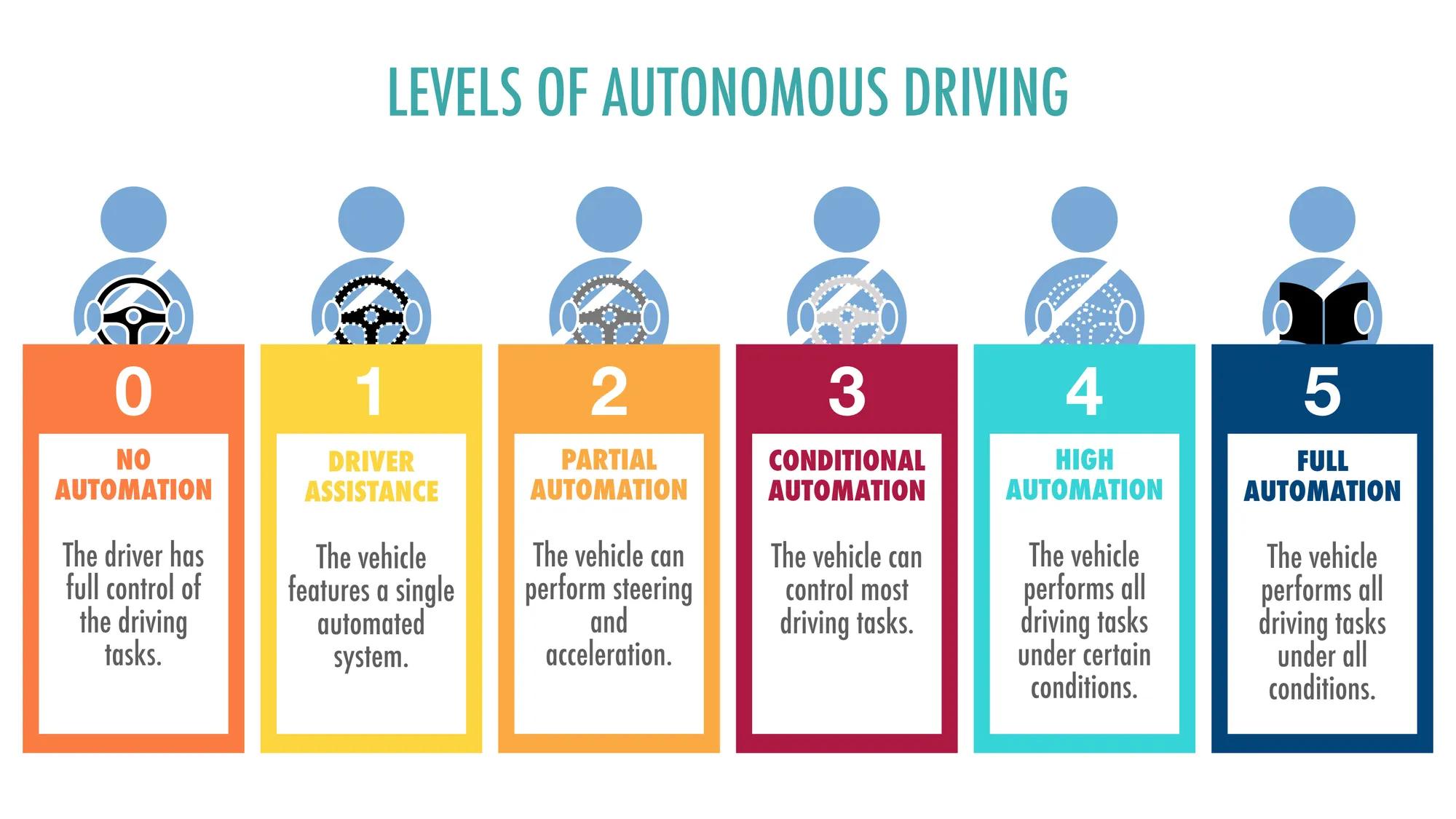
Today, we are commercially somewhere between level 2 (partial automation) and 3 (conditional automation). This means that the vehicle can perform some functions, like acceleration and steering, but the driver needs to be ready to take over at any time. This year, Daimler released a car on the market that can be considered level 3, able to drive autonomously in traffic jams (up to 60 km/h). But the driver still needs to be able to take over control at any time.
Actually, development is slower than initially expected. In the original roadmap (established around 2015), we expected to be in level 3 by 2018-2020, but we are about 5 years behind schedule already. We can expect ‘valet parking’ (autonomous parking of the vehicle at restaurants for example) by 2025. This however does not mean there are no autonomous vehicles on the roads today. Testing these cars is allowed around the world.
And what are the main obstacles faced?
There are quite a few hurdles to be taken – some expected by the public, others more surprising. Product liability, for example, is a very important hurdle at the moment. What will happen in case of an accident? Can the car manufacturers be held liable? In order to guarantee that autonomous cars are safer than human drivers, manufacturers need a lot of data – which means a lot of mileage driven. And that takes time of course. Next to that, there is also the legislation (e.g., a type of car might be allowed in one country but not in the next) that can be an issue.
Furthermore, it will also be tricky to mix autonomous vehicles with traditional cars on the road. Vehicles equipped with a telematic module, like many new cars in the higher segments today, constantly send data to surrounding cars: when they brake, when unexpected obstacles occur, etc. When some vehicles do this and others don’t, it becomes quite confusing for autonomous vehicles. In other words, it would be a lot easier if, from one day to the next, all vehicles were self-driving. But this is impossible, of course.
Where does the simulator enter the scene?
Next to the technical aspect, there is also the human factor. It’s not enough that engineers understand the system. Customers need to understand it as well. In level 3 automation, for example, there is always a moment in which situations become too difficult for the system, and it needs to hand over control to the driver. So, we need to test how to do this in a way that is both intuitive and safe.
Another very important aspect is subjective safety. Some situations are objectively safe (so there is never any real danger of an accident), while humans experience it as a critical hazard. For example: we can program autonomous vehicles to minimize the distance between cars in such a way that braking is still absolutely safe. In this way, more cars fit on the roads, resulting in less traffic jams. However, people often don’t feel comfortable driving this close. So, we need a lot of tests to optimize this distance.
You can also cut out certain situations (like a pedestrian crossing unexpectedly) and see how people react. It’s not enough to make sure that the system is safe, but people also need to feel safe with it. You could say that the simulator makes technology experienceable.
Next episode, we will dive deeper into the world of simulators for autonomous vehicles, detailing the visualization needs of such systems and its use. If you have any comments or need information, please feel free to contact us.


